Syed Zuhair Abbas Rizvi
Aspiration Statement
I am interested in visual computing, particularly computer vision and simulation. My intended path is R&D, where I use my research prowess to develop cutting-edge systems.
Core Skills
- Azure
- OpenCV
- Blender
- OpenGL
- Docker
- Photoshop
- Git
- Postman
- GLSL
- PyTorch ROS2
- Hugging Face
- RViz
- Lang chain
- Tensorflow
- Langfuse
- WebGL
- LLaMA
- OpenAI
Core Demonstrated Competencies
- Acts with Ownership
- Agility
- Collaborates Openly
- Drive for Results
- Encourages Innovation
- Planning
- Problem Solving
- Takes Initiative
Preferred Career Paths
First priority: Graphics/Simulation Engineer
Second priority: Computer Vision Engineer
Third priority: AI Engineer
Academic Awards / Achievements
- Dean's List 2023, 2024, 2025
- President's List 2023, 2024, 2025
Experience
Leadership / Meta-curricular
- Deputy Director Design - HUMUN Viii
- Graphic Designer - Arzu Anthology Vii
- Design Lead, Arts And Culture Club
- Design, Multiverse Club
Internship / Volunteer Work
- Software Engineer (Gen AI and LLMs) Intern, Data Science Dojo (March – June 2026)
- Teaching Assistant, Habib University (August 2023 – April 2026)
- Undergraduate Researcher, Habib University (June – August 2025)
- Undergraduate Researcher, Habib University (June – August 2024)
Publications / Creative Projects
- Research Paper – Explainable Multi-Crop Plant Disease Classification via a Two-Stage Multimodal Vision Transformer (in review)
- Research Paper – Zero-Shot Concrete Crack Segmentation using Multichannel Fusion (working on publication)
- Research Paper – Prompt-Based Music Recommendation (showcased in Summer Tehqiq Research poster presentations)
- Research Paper – LLMs for Sentiment Analysis in Petrol Price Videos (showcased in Summer Tehqiq Research Program poster presentations)
Final Year Project
Project Title
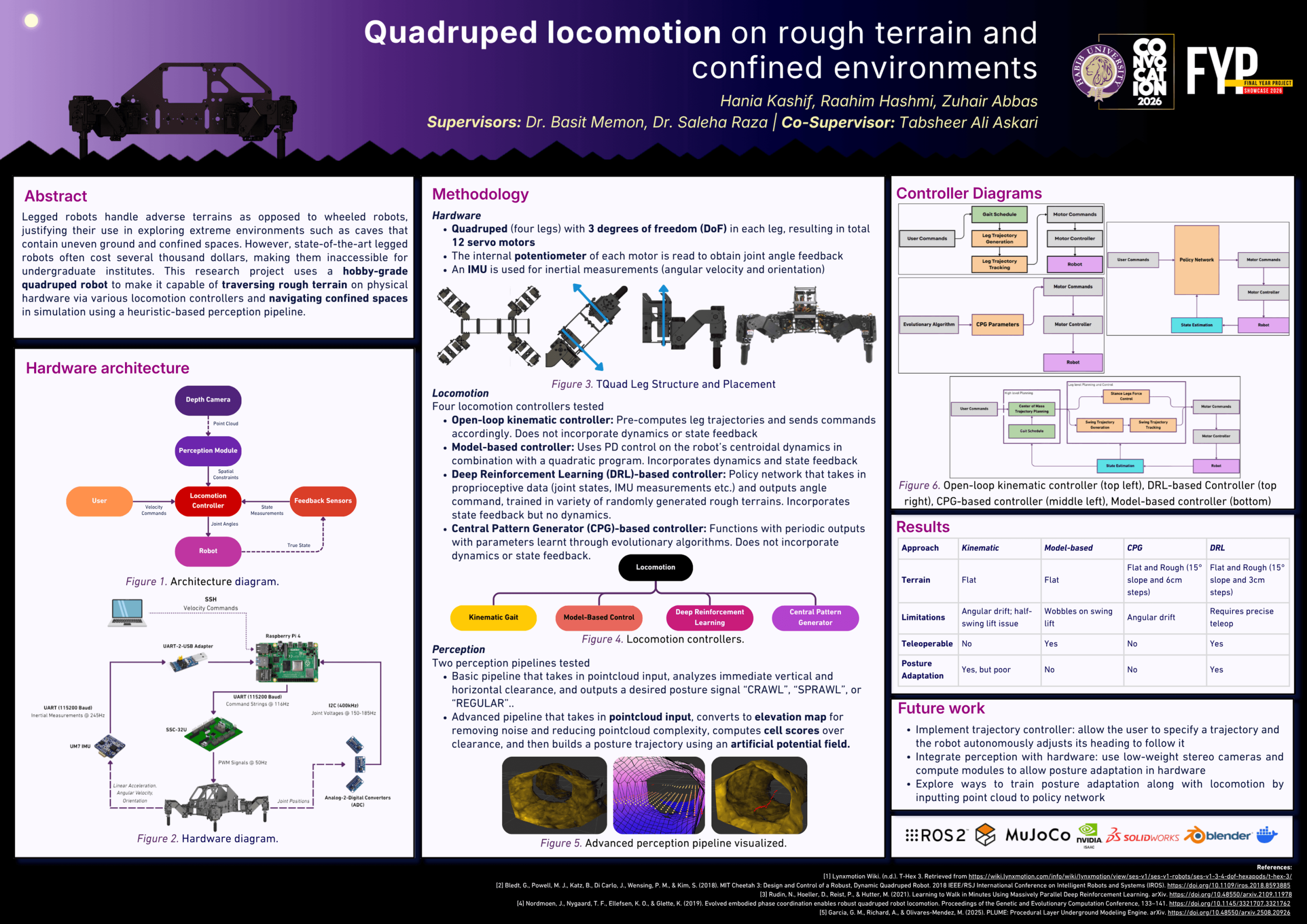
Quadruped Locomotion in Rough Terrain and Confined Environments
Description
Legged robots, in contrast to wheeled robots, have the added benefit of legged locomotion, allowing them to tackle different terrains (caves, tunnels, and rubble) that a wheeled robot cannot. Using a hobby-grade quadruped robot, we augmented it with mounts for our compute modules and sensors to obtain feedback required for robust locomotion. For locomotion in rough terrain, we tested classical control, learning-based approaches, and evolutionary algorithms. To allow the robot to navigate through confined spaces, we used a depth camera for perceiving the immediate terrain and deciding on a posture to constrain the locomotion algorithms to minimize collisions. Thanks to our simulation package, we were able to rapidly test and evaluate our algorithms virtually and physically using a testbed.
Project Pictures